
Pybullet is an open-source physics engine simulator for robotics. We will briefly explain how to use it.
Simple robot simulation
Please follow the installation instructions here. Let’s check that everything was installed correctly. Run this code, say hi to Pybullet and play with R2D2.
import pybullet as p
import time
import pybullet_data
# Start pybullet simulation
p.connect(p.GUI)
# p.connect(p.DIRECT) # don't render
# load urdf file path
p.setAdditionalSearchPath(pybullet_data.getDataPath())
# load urdf and set gravity
p.setGravity(0,0,-10)
planeId = p.loadURDF("plane.urdf")
cubeStartPos = [0,0,1]
cubeStartOrientation = p.getQuaternionFromEuler([0,0,0])
boxId = p.loadURDF("r2d2.urdf", cubeStartPos, cubeStartOrientation)
# step through the simluation
for i in range (10000):
p.stepSimulation()
time.sleep(1./240.)
p.disconnect()
The Pybullet commands are described in the documentation. The robot’s geometry and mechanics are described in XML files and can be loaded in Pybullet. The XML file format compatible with Pybullet are:
- URDF: the most common format. Many robots have public URDF file. URDF files are used by the ROS project (Robot Operating System), see here.
- SDF: this file format was developed as part of the Gazebo robot simulator, see here.
- MJCF: file format developed for the MuJoCo physics engine.
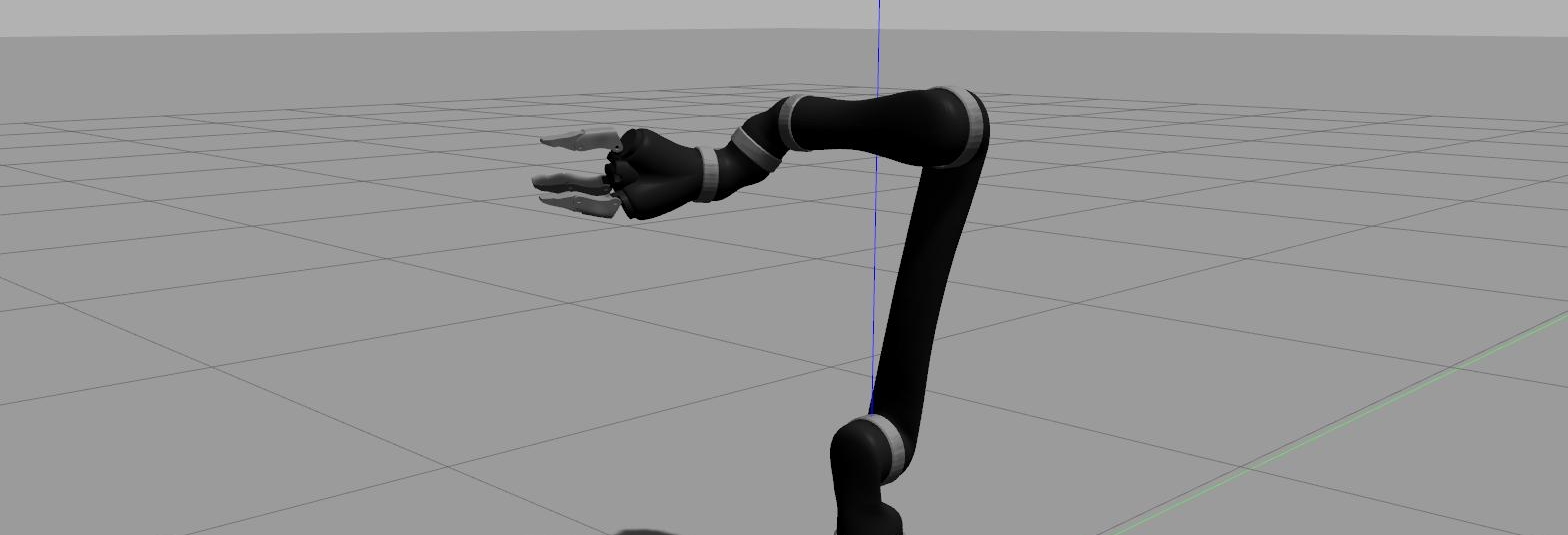
Many of these files are already included in Pybullet, see here. Let’s see another example where we import a Kuka robot. First, let’s download the Kuka urdf files from the ROS Github.
git clone https://github.com/ros-industrial/kuka_experimental.git
Then run this code:
import pybullet as p
import pybullet_data
import time
# start pybullet simulation
p.connect(p.GUI)
# reset the simulation to its original state
p.resetSimulation()
# load urdf file path
p.setAdditionalSearchPath(pybullet_data.getDataPath())
# import plane
plane = p.loadURDF("plane.urdf")
# import Kuka urdf and fix it to the ground
robot = p.loadURDF("kuka_experimental/kuka_kr210_support/urdf/kr210l150.urdf", [0, 0, 0], useFixedBase=1)
# request the position and orientation of the robot
position, orientation = p.getBasePositionAndOrientation(robot)
print("The robot position is {}".format(position))
print("The robot orientation (x, y, z, w) is {}".format(orientation))
# print the number of joints of the robot
nb_joints = p.getNumJoints(robot)
print("The robot is made of {} joints.".format(nb_joints))
print("The arm does not really have 8 joints. It has 6 revolute joints and 2 fixed joints.")
# print information about joint 2
joint_index = 2
joint_info = p.getJointInfo(robot, joint_index)
print("Joint index: {}".format(joint_info[0]))
print("Joint name: {}".format(joint_info[1]))
print("Joint type: {}".format(joint_info[2]))
print("First position index: {}".format(joint_info[3]))
print("First velocity index: {}".format(joint_info[4]))
print("flags: {}".format(joint_info[5]))
print("Joint damping value: {}".format(joint_info[6]))
print("Joint friction value: {}".format(joint_info[7]))
print("Joint positional lower limit: {}".format(joint_info[8]))
print("Joint positional upper limit: {}".format(joint_info[9]))
print("Joint max force: {}".format(joint_info[10]))
print("Joint max velocity {}".format(joint_info[11]))
print("Name of link: {}".format(joint_info[12]))
print("Joint axis in local frame: {}".format(joint_info[13]))
print("Joint position in parent frame: {}".format(joint_info[14]))
print("Joint orientation in parent frame: {}".format(joint_info[15]))
print("Parent link index: {}".format(joint_info[16]))
# print state of joint 2
joints_index_list = range(nb_joints)
joints_state_list = p.getJointStates(robot, joints_index_list)
print("Joint position: {}".format(joints_state_list[joint_index][0]))
print("Joint velocity: {}".format(joints_state_list[joint_index][1]))
print("Joint reaction forces (Fx, Fy, Fz, Mx, My, Mz): {}".format(joints_state_list[joint_index][2]))
print("Torque applied to joint: {}".format(joints_state_list[joint_index][3]))
# print state of link 2
link_state_list = p.getLinkState(robot, 2)
print("Link position (center of mass): {}".format(link_state_list[0]))
print("Link orientation (center of mass): {}".format(link_state_list[1]))
print("Local position offset of inertial frame: {}".format(link_state_list[2]))
print("Local orientation offset of inertial frame: {}".format(link_state_list[3]))
print("Link frame position: {}".format(link_state_list[4]))
print("Link frame orientation: {}".format(link_state_list[5]))
# Define gravity in x, y and z
p.setGravity(0, 0, -9.81)
# define a target angle position for each joint (note, you can also control by velocity or torque)
p.setJointMotorControlArray(robot, joints_index_list, p.POSITION_CONTROL, targetPositions=[-1, 0, -0.5, 1, 1, 0, 0, 0])
joint_index = 2
# step through the simulation
for _ in range(1000000):
p.stepSimulation()
time.sleep(1./30.) # slow down the simulation
joints_state_list = p.getJointStates(robot, joints_index_list)
print("Joint position: {}".format(joints_state_list[joint_index][0]))
print("Joint velocity: {}".format(joints_state_list[joint_index][1]))
print("Torque applied to joint: {}".format(joints_state_list[joint_index][3]))
p.disconnect()
The Pybullet - Gym interface
Ok so we know how to import robots in Pybullet. Now, how do we train them? We need a way to interact with the simulation using the Gym interface. Fortunately, Pybullet interfaces very nicely with Gym using its pybullet_envs library. For example, you can import the cart-pole environment this way:
You can also visualise pre-trained environments here. For example, see this Kuka grasping robot following a continuous downward policy using the following command.
python -m pybullet_envs.baselines.enjoy_kuka_diverse_object_grasping
However, the environments found in pybullet_envs are not exactly the same as those offered by MuJoCo. Fortunately, the Pybullet-gym library has just re-implemented most MuJoCo and Roboschool environments in Pybullet and they seamlessly integrate with OpenAI Gym. For example, the MuJoCo reacher environment can be loaded using this code.

Leave a comment